

Lời nói đầu .
Tạp chí Symmetry trình bày rất nhiều lĩnh vực khác nhau trong Vật lý hiện đại với những ý tưởng , bài viết , công trình lý thuyết lẫn thực nghiệm của tập thể các nhà khoa học hàng đầu hiện nay trên thế giới . Chuyên mục " Hiểu biết Vật lý trong 60 giây " tổng hợp một số bài viết ngắn gọn , súc tích và đầy tính đột phá trong việc giải thích các cơ chế vật lý nhằm giúp người đọc dễ dàng tiếp cận những thông tin mới mẻ . Tác giả của những bài viết này hiện đang công tác tại các Trung tâm nghiên cứu , Viện Khoa học và các trường Đại học danh tiếng nên nguồn thông tin luôn được cập nhật thường xuyên .
Xin trân trọng giới thiệu đến bạn đọc .
Trần hồng Cơ .
Tham khảo - Trích lược .
Ngày 05/05/2014.
-------------------------------------------------------------------------------------------
Máy va chạm tuyến tính (ILC)

Minh họa: Sandbox Studio
Máy va chạm tuyến tính (International Linear Collider - ILC) là một máy va chạm electron-positron mới được đề xuất . Cùng với Large Hadron Collider tại CERN, nó sẽ cho phép các nhà vật lý khám phá các miền năng lượng ngoài tầm phát hiện của các máy gia tốc hiện nay. Tại những nguồn năng lượng này , các nhà nghiên cứu dự đoán những khám phá quan trọng đó sẽ dẫn đến một sự hiểu biết hoàn toàn mới về những gì vũ trụ được tạo dựng và cách thức hoạt động của vũ trụ .

Bản chất của va chạm hạt tại ILC sẽ cung cấp sự chính xác để trả lời câu hỏi hấp dẫn mà những khám phá tại LHC đưa ra , từ danh tính của vật chất tối đến sự tồn tại của các chiều bổ sung.
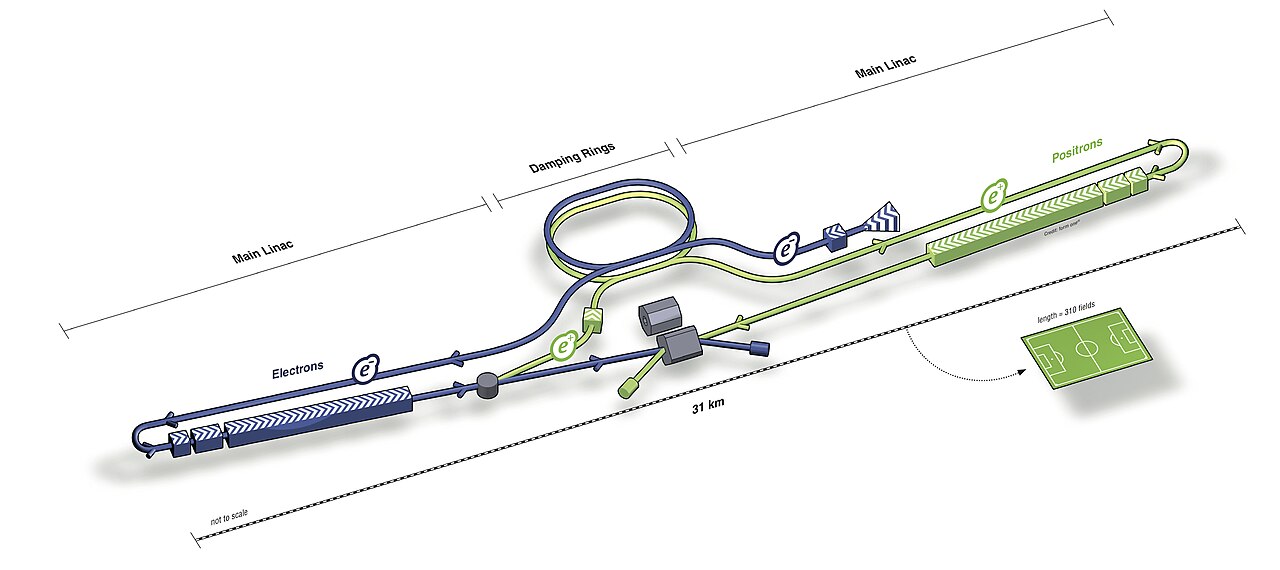 |
| Nguồn : http://en.wikipedia.org/wiki/International_Linear_Collider#mediaviewer/File:ILC_SchemeTDR.jpg |
Trong thiết kế của ILC, hai máy gia tốc tuyến tính được thiết kế đối mặt nhau , mỗi cái dài 20 km, sẽ bắn ra chùm electron và positron về phía nhau với tốc độ gần 99,99% tốc độ ánh sáng.

Mỗi chùm tia chứa mười tỷ electron hoặc positron được nén đến một độ dày cực nhỏ khoảng ba nanomet . Khi các hạt được dẫn xuống máy va chạm, các khoang siêu dẫn gia tốc hoạt động ở nhiệt độ gần độ không tuyệt đối sẽ bơm thêm năng lượng vào chúng. Các chùm tia này va chạm vào nhau khoảng 2.000 lần mỗi giây sẽ tạo ra một những đợt pháo hoa chứa đựng các hạt mới.
ILC được thiết kế, tài trợ, quản lý, và hoạt động như một dự án khoa học quốc tế hoàn thiện .

01/08/2005
Theo Neil Calder, Trung tâm máy gia tốc tuyến tính Stanford
+++++++++++++++++++++++++++
Nguồn :
1. http://www.symmetrymagazine.org/article/august-2005/explain-it-in-60-seconds
2. https://www.linearcollider.org/ILC
3. http://en.wikipedia.org/wiki/International_Linear_Collider
4. http://home.web.cern.ch/about/updates/2013/06/international-linear-collider-ready-construction
5. http://www.mathworks.in/company/newsletters/articles/controlling-electron-beams-in-the-international-linear-collider.html
6. http://arstechnica.com/science/2013/06/the-international-linear-collider-will-be-a-higgs-factory/
Trần hồng Cơ
Tham khảo - Trích lược .
Ngày 08/11/2014 .
-------------------------------------------------------------------------------------------
Chúng ta phải biết và chúng ta sẽ biết .
David Hilbert .

































































{kind=link}
{kind=link}